 FullgaZ אופנועים, קטנועים וכל מה שגז
FullgaZ אופנועים, קטנועים וכל מה שגז
אופנועים וקטנועים מודרניים מגיעים עם מערכת אלקטרונית המודדת את הכוחות והמומנטים הפועלים עליה, ומווסתת בהתאם בקרות עזר שונות כמו בקרות הזינוק, הבלימה, האחיזה, ואף בקרות הווילי והסטופי. אנו נסקור כאן את מערכות ה-IMU המודרניות, שבאות לעזור לנו ברכיבה, לעשות אותנו מהירים יותר ולהציל חיים.
עד לפני מספר שנים, הרעיון של בקרות אלקטרוניות באופנועים וקטנועים לא היה מובן מאליו. בעולם הרכבים, לעומת זאת, בקרות הבלימה והאחיזה מחויבות על-פי כל תקן וכל דרישה במרבית העולם, לרבות בישראל. כיום, המושגים ABS להטיה, בקרת אחיזה חד או רב-שלבית, בקרת החלקה של הגלגל האחורי (דריפטים), בקרת ווילי, בקרת סטופי ובקרת זינוק הפכו להיות מובנים באופנועי ספורט מודרניים (ראו דוקאטי פניגאלה V2), בייבי-אדוונצ'ר (ק.ט.מ 390 אדוונצ'ר), תלת-גלגלי (ימאהה טריסיטי 300) ואף בקטנועים. מערכות עזר אלו הפכו לזולות לפיתוח, והן אינן משפיעות על המשקל הכללי של האופנוע. לכל הבקרות הללו יש מכנה משותף: הן מקבלות חלק חשוב הנתונים דרך יחידת ה-IMU.

IMU (ר"ת Inertial Measurement Unit – יחידת מדידה אינרציאלית) היא מערכת אלקטרונית אשר מודדת את הכוחות והמומנטים הפועלים עליה (ועל האופנוע). בעזרת שילוב של מדי תאוצה – חיישנים המשמשים למדידת תאוצה קוויות, סיבובית וג'יירוסקופים – מודדים את הזווית שבין גוף הנמצא בתנועה לגוף במצב אופקי (הקרקע). חיישנים אלו, אגב, נמצאים גם בסמארטפון הממוצע שלכם. אם ניקח, לצורך העניין, בקרת אחיזה או ABS רגיל, אזי הנוסחה כאן היא יחסית פשוטה: חיישני המהירות מודדים את ההבדלים בין המהירות של שני הגלגלים, וברגע שיש פרש מהירויות, המערכת מפחיתה את מהירות המנוע או מפעילה את הבלמים רגעית או משחררת את הבלמים. במקרה של ABS להטיה, המתאפשר רק בעזרת נתונים שמתקבלים מה-IMU, המצב קצת יותר מורכב: בזמן פנייה הציר הקדמי והציר האחורי מבצעים דרך מעט שונה, שגם נובע מהמידות השונות של הגלגלים והצמיגים. במקרה כזה, המחשב צריך לקבל תמונת מצב מדויקת, לדעת לעבד מידע על זווית ההטייה ביחס לכביש, התאוצה או ההאטה, ולהפעיל את המערכות הרלוונטיות למצב.
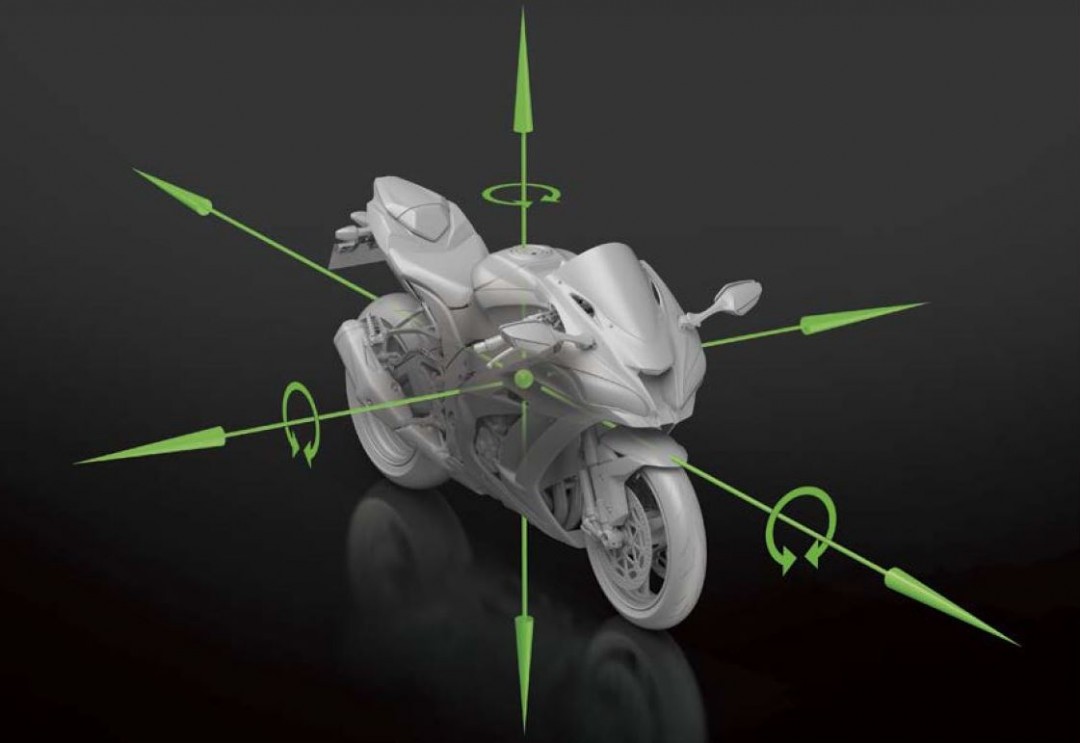
מד התאוצה והג'יירוסקופ מכוילים בצורה המאפשרת למדוד את הזווית והמצב של כל ציר. למעשה, IMU ב-6 צירים, אליו אנו מתייחסים באופנועים המודרניים, מודד עלרוד (Pitch), גלגול (Roll), סבסוב (Yaw), תאוצה אורכית (Longitudinal Acceleration), תאוצה אנכית (Vertical Acceleration) ותאוצה אלכסונית וצדית (Transverse Acceleration). מערכת ה-IMU קוראת את הנתונים בין 100 ל-125 פעמים בשנייה, והיא מעבירה את המידע דרך רשת ה-CAN Bus (ר"ת Controller Area Network). כאן מדובר על מחשב יחיד אשר משמש כממשק, אשר דרך שני חוטים מלופפים מעביר מידע בין כל המערכות. מהירות העברת הנתונים של ה-CAN Bus היא בין 500 ל-1,000 נתונים בשנייה. מספיק נתונים כדי לספק תגובות מחשב מהירות לכל אחת ממערכות העזר, עליהן תכף נרחיב.

מערכת ABS (ר"ת Antilock Brake System) – מערכת למניעת נעילת גלגלים בבלימה. המערכת מחולקת למחשב ולמודולטור – בית שסתומים. חיישני מהירות על הגלגלים מדווחים למחשב מה מהירותו של כל גלגל, וכאשר תחת בלימה אחד הגלגלים מאט משמעותית או נעצר לגמרי, כלומר מחליק, המחשב, דרך המודולטור, משחרר לחצים מקו צינור הבלם של אותו גלגל בתדירות של עשרות פעמים בשנייה ובכך מונע את נעילת הגלגל. חיישני ה-IMU יודעים לקחת בחשבון גם מצב בו האופנוע נמצא בהטיה, שם יש פחות שטח מגע של הצמיג בקרקע, להעביר את המידע ולווסת את ה-ABS בהתאם.
מצערת חשמלית היא מצערת שבה כשהרוכב פותח את ידית המצערת הוא לא פותח פיזית את הפרפרית בגוף המצערת, אלא נותן פקודה למחשב להאיץ את המנוע. המחשב מצידו מתחשב בנתונים נוספים ופותח את המצערת לפי מה שנכתב לו במפת ניהול המנוע. למערכת ניהול מנוע עם מצערות חשמליות, שמקבלת את הנתונים דרך כל החיישנים, יש יתרון מהותי נוסף – היא מאפשרת הטמעה של מערכות עזר אלקטרוניות נלוות בקלות רבה יחסית, ולמערכות מסוימות היא אף הכרח. מערכות בקרת החלקה, מערכות בקרת ווילי (כולל אפשרות לשליטה על גובה הרמת הגלגל) או בקרת זינוק – כולן קלות יותר ליישום עם מצערות חשמליות. גם מערכת בקרת שיוט, שבה הרוכב קובע את מהירות הנסיעה, קלה מאוד ליישום עם מצערות חשמליות, שכן אז מחשב ניהול המנוע שומר על מהירות הנסיעה שנקבעה על-ידי פתיחה או סגירה של המצערות בהתאם לצורך. גם קוויקשיפטר, שמאפשר להעביר הילוכים ללא שימוש במצמד, מרחיב את פעולתו עם מצערות חשמליות. קוויקשיפטר שמאפשר רק העלאה של הילוכים אפשרי כמעט בכל מערכת הזרקת דלק מפני שמספיק ניתוק רגעי של ההצתה וההזרקה כדי להעביר הילוך, אולם בקוויקשיפטר שמאפשר גם הורדת הילוך (אוטובליפר) נדרשות מצערות חשמליות, שכן בהורדת הילוך המחשב פותח את המצערות, בעצם נותן 'גז ביניים', משווה מהירויות בין המנוע לבין ההילוך הנבחר שאליו מורידים, ומאפשר העברת הילוך חלקה.

בקרת החלקה, בקרת אחיזה, בקרת משיכה, בקרת יציבות – כל אלו שמות שונים של כמעט אותה המערכת. מערכת בקרת האחיזה מזהה שינויי מהירויות בין שני הגלגלים בזמן תאוצה, כלומר סיבוב יתר של הגלגל האחורי (החלקה בתאוצה), ומפחיתה את כוח המנוע על ידי הקטנת ההזרקה ואיחור ההצתה. מערכות פשוטות, כמו למשל בכלים היפניים, עובדות רק על מחשב ניהול המנוע ומפחיתות את מומנט המנוע תוך כדי החלקה בתאוצה. מערכות מתקדמות יותר, כמו בכלים האירופאיים היוקרתיים, משלבות את מערכת ה-ABS עם מחשב ניהול המנוע (שוב, על ידי תקשורת CAN Bus), ויודעות לווסת את כוח המנוע הרבה יותר טוב ועל ידי כך לקבל הפחתת כוח חלקה יותר, בלי המכה הנלווית לניתוק המנוע.
מערכות האלקטרוניקה המודרניות מעניקות תמונת מצב מדויקת ועדכנית למערכת ניהול המנוע, שמתפעל את המערכות הרלוונטיות בהתאם למצב הנתון. בוש – החברה המובילה בתחום, שהחיישנים שלה יודעים לעבוד עם מרבית היצרנים – פיתחה את מערכות החיישנים שלה רק בסוף שנות ה-90, שכללה אותם לכדי צ'יפים מיקרוסקופיים, והטמיעה אותם באופנועים שניתן לרכוש באולמות התצוגה – כמובן, שקבוצות מרוצים מהליגה הראשונה כבר עבדו איתם עוד לפני כן – רק בעשור האחרון. מערכות אלו יודעות לשמור עלינו בראש ובראשונה וגם לגרום לנו להיות מהירים יותר במסלול, בכביש ובשטח.

תודה לגידי גולן על העזרה בהכנת הכתבה.



